
I was recently introduced to the MDBT40 module that is based on the Nordic nRF51822. The processor nicely solves a number problems I’ve been looking at and the fact that it’s Bluetooth Smart also solves how I’ll get the data from it.
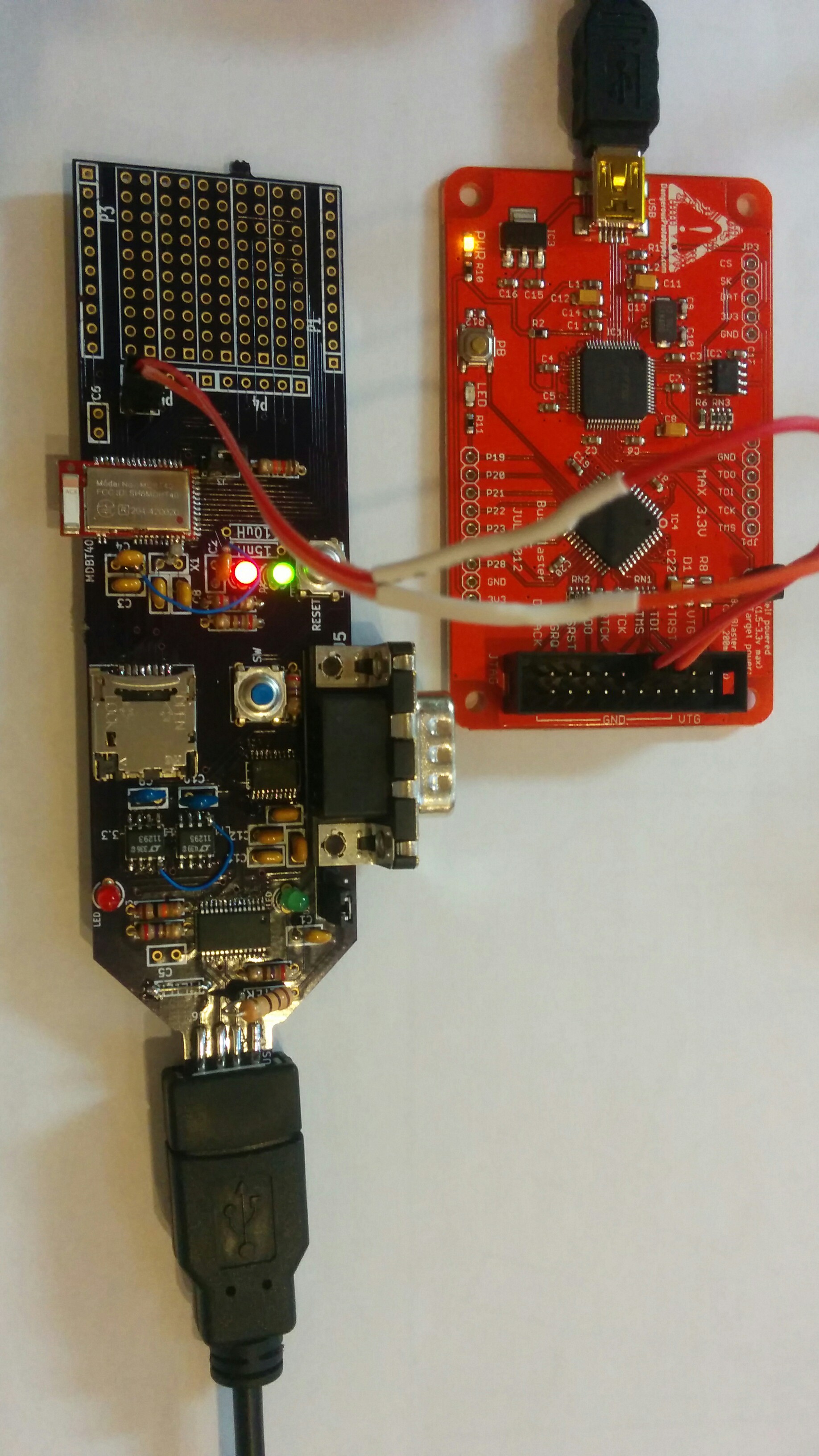
I designed some custom hardware ( the picture at left ) around the module and I needed some way to program it. My earlier post shows my investigations with SWD and OpenOCD.I put a SWD header on the board to re-program it.
OpenOCD Configuration for the nRF51822
bishop on the Nordic Developer Zone figured out how to get the nRF51822 part working with S-Link and OpenOCD. I took his configuration and adjusted it to work with the bus blaster v3.
transport select swd
set WORKAREASIZE 0
source [find target/nrf51.cfg]
Save it as nrf51822.cfg so then you can start openocd with it.
OpenOCD defaults to a telnet interace on 4444.
Trying 127.0.0.1...
Connected to 127.0.0.1.
Escape character is '^]'.
Open On-Chip Debugger
> halt
target state: halted
target halted due to debug-request, current mode: Thread
xPSR: 0x21000000 pc: 0x000163da msp: 0x20003fd8
> nrf51 mass_erase
> flash write_image _build/akkea1_tfw.hex
Padding image section 0 with 2112 bytes
Padding image section 1 with 3572 bytes
Padding image section 2 with 1 bytes
not enough working area available(requested 32)
no working area available, falling back to slow memory writes
wrote 95556 bytes from file _build/akkea1_tfw.hex in 14.267832s (6.540 KiB/s)
> reset
The board is now prgrammed with your custom firmware. This should work with any MDBT40 based board the has the 12K programming resistor per the Raytac application note. It should also work with other nRF51822 based board with a SWD interface